Student PW zaprojektował robota, który pomoże straży pożarnej
„LIvE SAVER” - to nazwa zdalnie sterowanego robota mobilnego, który pomoże straży pożarnej w akcjach ratunkowych. Zaprojektował go Piotr Kurządkowski, student Wydziału Mechatroniki PW i strażak-ochotnik.
- Gdy pojawiła się konieczność wyboru tematu pracy inżynierskiej, wpadłem na pomysł połączenia dwóch moich pasji, czyli służby w ochotniczej straży pożarnej i dużego zainteresowania techniką, robotyką - mówi Piotr Kurządkowski. - Chciałem stworzyć coś naprawdę funkcjonalnego i użytecznego. Po analizie rynku pożarniczego, rozmowach z przyjaciółmi z jednostki OSP w Piątnicy, a nawet zasięgając opinii strażaków zawodowych, zauważyłem deficyty w rozwiązaniach robotycznych ułatwiających pracę strażakom - wyjaśnia.

Piotr Kurządkowski
Istnieją już samobieżne działka wodne na platformach jezdnych, jednak ich popularność jest wciąż mała, a kompaktowych rozwiązań używanych do inspekcji na próżno szukać. Mowa o sterowanym przez operatora niewielkim kompaktowym robocie, dzięki któremu znacznie zwiększamy efektywność przeprowadzanych akcji, a przede wszystkim nie ryzykujemy zdrowia i życia strażaków. - Tak narodził się projekt robota „LIvE SAVER”, który będzie wspierał strażaków w poszukiwaniach poszkodowanych osób podczas pożarów wielopiętrowych budynków - mówi młody inżynier.
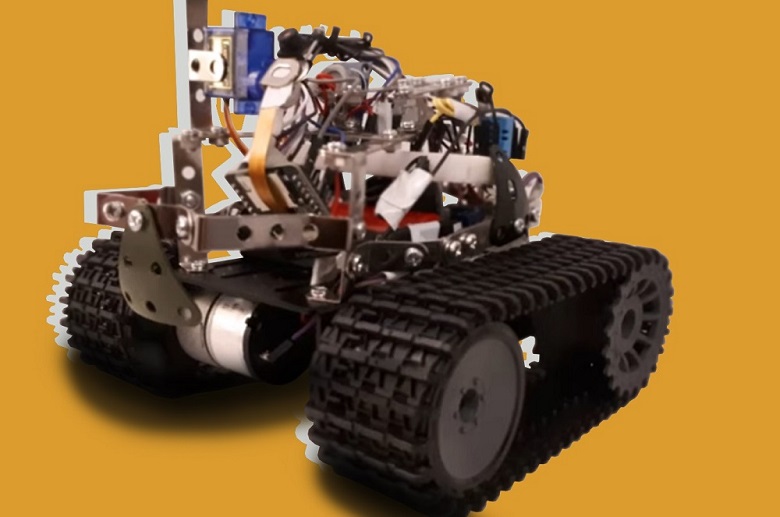
Robot osadzony jest na aluminiowym podwoziu, a jego gąsienice wprawiane są w ruch za pomocą dwóch silników prądu stałego. Mózgiem całego robota jest mikrokontroler, współpracujący z modułem kamery oraz obsługujący komunikację bezprzewodową. Dodatkowo zestaw wyposażony jest w czujniki gazów wybuchowych, takich jak metan czy LPG, oraz czujnik temperatury i wilgotności. Zebrane z nich dane są kluczowe przy podejmowaniu decyzji o przebiegu akcji ratunkowej. Aby zapewnić większe pole widzenia w osi pionowej, kamera została umieszczona na serwomechanizmie. Cały układ zasilany jest czterema akumulatorami.
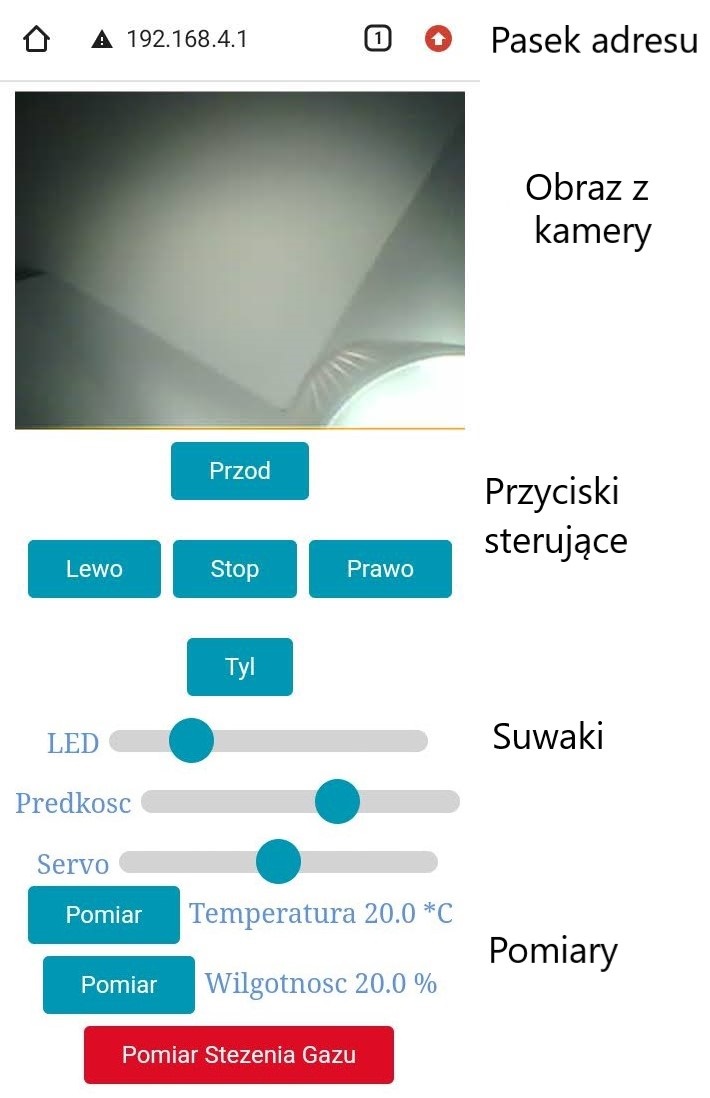
Panel sterowania robotem
Z panelem sterowania można połączyć się poprzez wpisanie adresu IP do przeglądarki. Na samej górze widoczny jest obraz „na żywo” z kamery, poniżej znajdują się przyciski sterujące ruchem robota. Widoczne są również suwaki odpowiedzialne za natężenie światła emitowanego z diody LED, wartość prędkości oraz położenie serwa. Kolejną sekcję zajmują przyciski wyzwalające pomiar temperatury i wilgotności, a na samym dole - stężenia gazów wybuchowym, który kolorem zielonym lub czerwonym wskazuje potencjalne zagrożenie.
- Gdyby nie robot strażacy musieliby pokonać kilkadziesiąt metrów w każda stronę, w niskiej pozycji lub nawet na kolanach, w budynku, w którym są przecież pierwszy raz. W ten sposób zwiększamy szybkość przeprowadzania akcji ratunkowej. Na bieżąco dostajemy informacje z kamery czy sensorów, które mogą decydować o przebiegu i skuteczności akcji gaśniczej - tłumaczy Piotr Kurządkowski.
Projekt jest otwarty, a jego autor już myśli o kolejnych udoskonaleniach. Do opracowania i wykonania pozostaje na przykład dedykowana obudowa, która jeszcze nie powstała, by lepiej uwidocznić podzespoły robota. Przyda się również specjalny kontroler z dużym ekranem, który można obsługiwać w rękawicach.
- Chciałbym kontynuować rozmowy ze środowiskiem pożarniczym. Już zauważyłem duży entuzjazm i zainteresowanie tematem - podkreśla Piotr Kurządkowski.
Więcej o robocie można dowiedzieć się z przygotowanego przez naszego studenta filmu.
Tekst: Bartosz Matejko/Biuletyn PW
